STM32中的GPIO框图解析与软件配置
本文最后更新于:几秒前
1 【学习笔记】STM32中的GPIO框图解析与软件配置
1.1 GPIO简介
GPIO全称为General-purpose I/O ports,一般译为“通用输入输出端口”,是STM32单片机中最基础的外设之一。
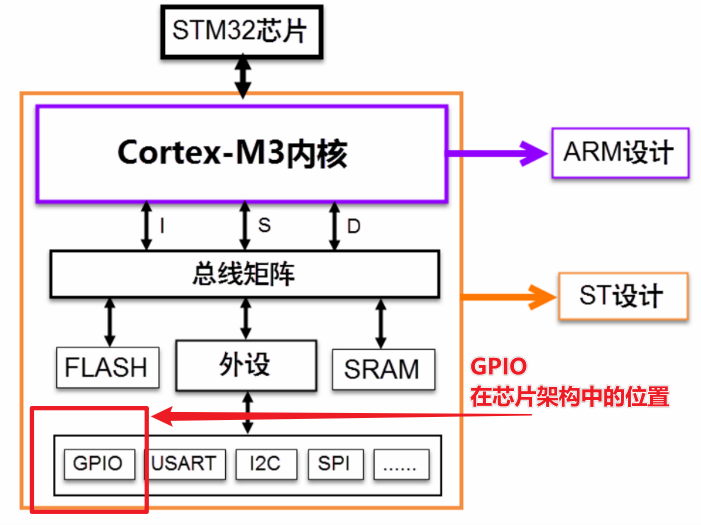
STM32芯片架构简图 参考<STM32库开发实战指南——基于野火MINI开发板>
GPIO有输出输入两种功能,可以实现与外部通讯、控制外部设备以及数据采集等功能。GPIO分为多组port,每一组port下一般有16个pin。
GPIOA12,为A组第12号引脚。(关于port和pin的叫法属于个人习惯)
输出功能可以实现控制引脚输出高低电平,实现开关控制,也可以接入继电器# 【学习笔记】STM32中的GPIO框图解析与软件配置
1.2 GPIO简介
GPIO全称为General-purpose I/O ports,一般译为“通用输入输出端口”,是STM32单片机中最基础的外设之一。
STM32芯片架构简图 参考<STM32库开发实战指南——基于野火MINI开发板>
GPIO有输出输入两种功能,可以实现与外部通讯、控制外部设备以及数据采集等功能。GPIO分为多组port,每一组port下一般有16个pin。
GPIOA12,为A组第12号引脚。(关于port和pin的叫法属于个人习惯)
输出功能可以实现控制引脚输出高低电平,实现开关控制,也可以接入继电器与三极管,实现控制大功率电路通断。
输入功能可以实现检测外部电平、读取引脚状态、采集模拟信号等功能。
下面对GPIO基本框图进行分析,了解GPIO主要的工作原理。
过一遍理解就可,有个印象
1.3 GPIO基本框图
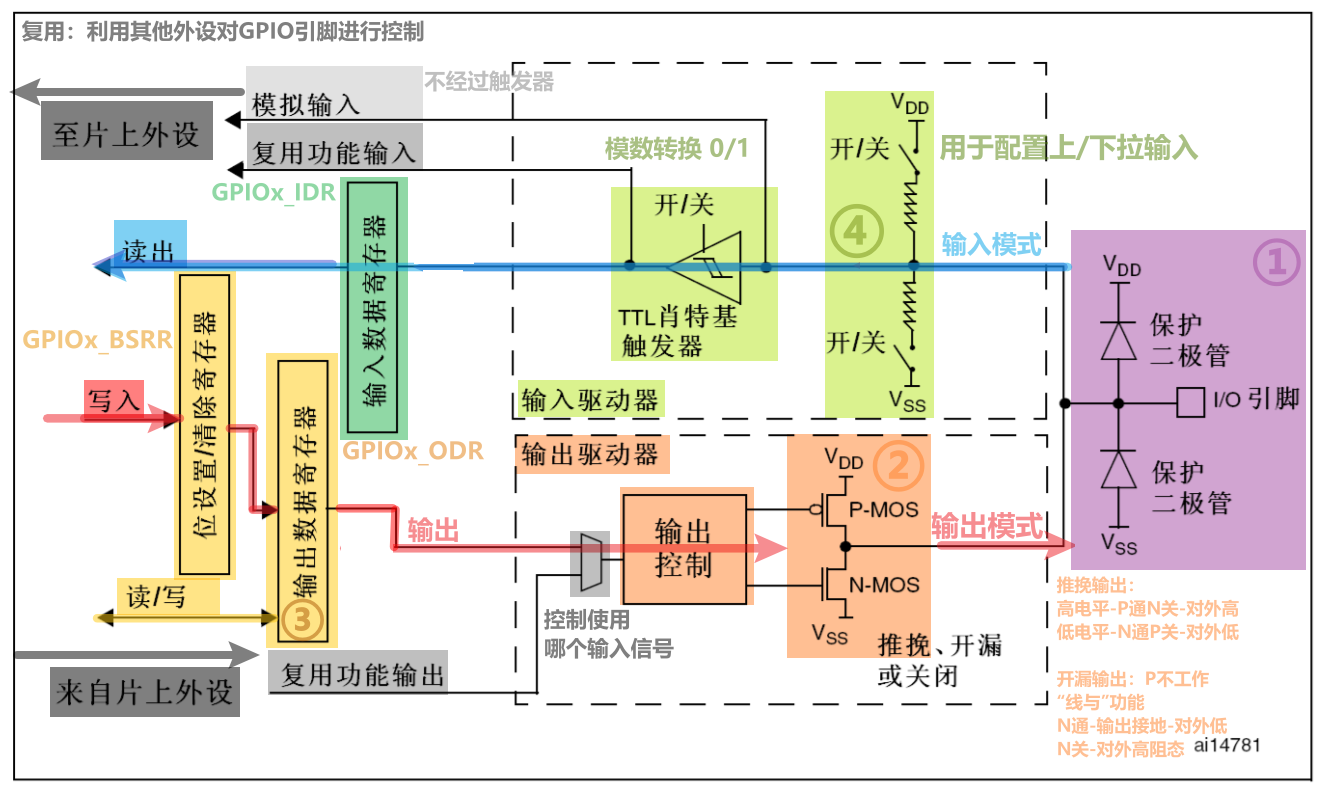
虽然标注的有点花花绿绿()但是大致上可以分为三个部分:
- 紫色为引脚与外部设备连接的端口。
- 以蓝色箭头为主线的一串冷色相关的,为输入模式相关的电路。
- 以红色箭头为主线的一串暖色相关的,为输出模式相关的电路。
首先是紫色的保护二极管与上下拉电阻。
引脚电压高于 ,上方二极管导通。
引脚电压低于 ,下方二极管导通。
这样就可以防止不正常的电压引入芯片导致芯片烧毁。但要注意,纵使有这样的保护也不能直接外接大功率驱动器件。
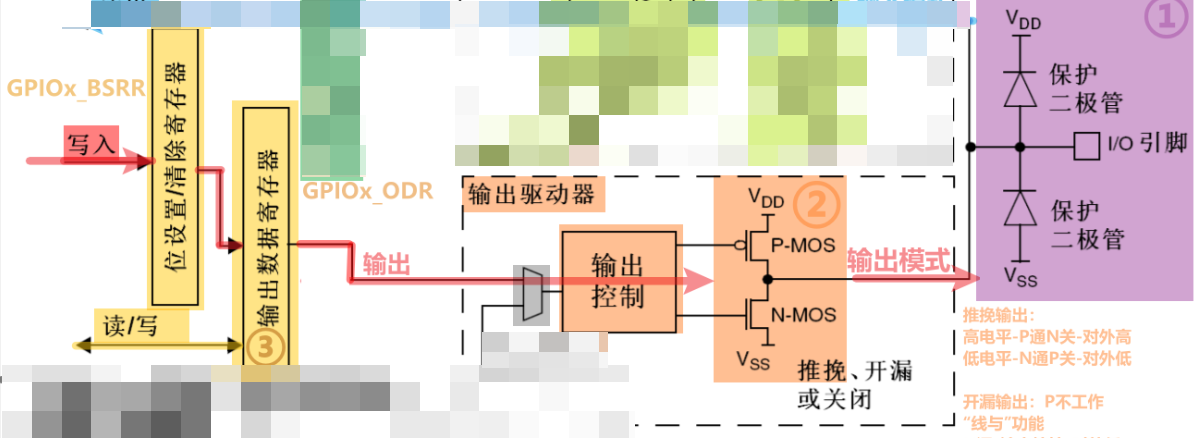
其次是红色的输出模式这一条线,从左往右看。
由输出数据寄存器GPIOx_ODR开始,单片机可以对该寄存器修改值,从而给输出控制一个信号。
除此之外对置位/复位寄存器 GPIOx_BSRR的值进行修改也可以影响”输出数据寄存器“的值。
由这两个寄存器给出信号之后,通过一个开关接入输出控制。该开关可以控制是由”输出数据寄存器“还是由其他片上外设作为”输出源“。
例如要使用串口的时候,需要一个通讯发送引脚的时候,就可以将某个GPIO引脚配置为串口复用功能。
最关键的是由P-MOS与N-MOS两个管子组成的单元电路。这个单元电路使得GPIO的输出模式有两个模式,分别是推挽输出和开漏输出。
推挽输出中
输出源给高电平,经过反向,上方的P-MOS导通,下方的N-MOS关闭,对外输出高电平;
输出源给低电平,经过反向,上方N-MOS管关闭,上方P-MOS导通,对外输出低电平;
开漏输出中,上方的P_MOS不工作
当N-MOS导通的时候对外输出为低电平(接地);
当N-MOS关闭的时候对外为高阻态,正常使用的时候需要接上拉电阻;此时等效于开漏电路,具有“线与”特性,一般应用在I2C、SMBUS通讯等需要“线与”功能的总线电路中,或者需要输出电平不匹配的时候。
比如需要输出 5 伏的高电平,就可以在外部接一个上拉电阻,上拉电源为 5 伏, 并且把GPIO设置为开漏模式,当输出高阻态时,由上拉电阻和电源向外输出 5 伏的电平。
最后是蓝色的输入模式这一条线,从右往左看。
通过引脚采集电压之后,首先通过上/下拉电阻,配置成上/下拉输入,随后接一个TTL肖特基触发器,进行模数转换。
最后将触发器给出的数字信号存储在“输入数据寄存器GPIOx_IDR”中,通过读取该寄存器就可以了解GPIO引脚的电平状态。
输入模式中的复用功能输入与复用功能输出类似,也只是不经过“输入数据寄存器”,直接连接其他的片上外设,让别的外设读取引脚状态。
例如使用串口通讯,需要一个通讯接收引脚的时候,就可以将某个GPIO引脚配置为串口复用功能。此处与输出模式的复用功能输入所举的例子对应。
模拟输入与输出的通道是当引脚需要做ADC/DAC的时候,需要用原始信号时所提供的通道。
ADC时需要采集原始的模拟信号,因此不经过触发器。
DAC时需要输出原始的模拟信号,因此不经过双MOS管的结构。
A for analog, D for digital. ADC-模数转换,DAC数模转换。
至此基本将GPIO的原理框图进行了一遍梳理,下面为在HAL库中如何配置GPIO的一些记录。
1.4 HAL库中GPIO的配置
本节例程参考野火的<STM32 HAL库开发实战指南——F103系列>使用固件库点亮LED一章
首先明确一下软件上的层级关系:
LED灯的控制相关的代码不属于STM32HAL库的内容,一般将这样的控制代码封装在另外的文件中。本次例程中将文件名命名为bsp_led.c与bsp_led.h,这里的bsp是Board Support Packet的简写,即板级支持包。
对bsp的个人理解:不同外设的控制代码。
本次使用的开发板是野火的F103-MINI 开发板,下面是本次例程所涉及的硬件原理图:
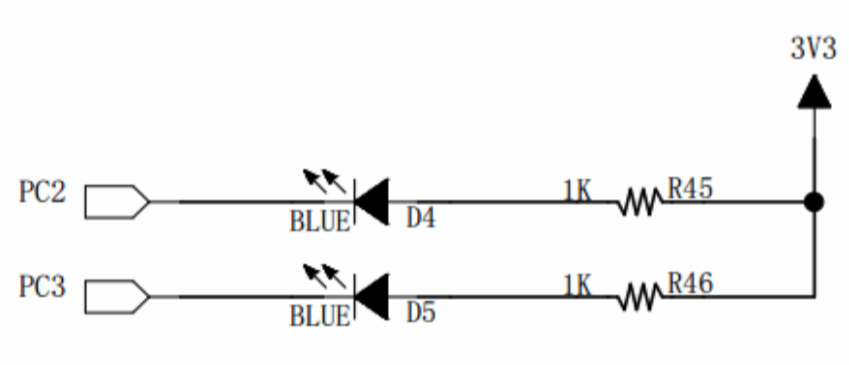
如图所示容易看出,若将这两个GPIO引脚设置为低电平即可点亮LED。
本次例程中关于引脚定义的宏:
bsp_led.h
1 | |
1 | |
此处控制LED亮灭的操作是直接向BSRR写入控制指令来实现的,对BSRR低 16 位 写 1 输出高电平,对BSRR高 16 位写 1 输出低电平。同时,对ODR某位进行异或操作可反转位的状态。
BSRR和ODR在前文详解GPIO框图的输出模式时候提到过
BSRR:置位/复位寄存器 GPIOx_BSRR,Bit Set/Reset Register
ODR:输出数据寄存器GPIOx_ODR,Output Data Register
由
输出数据寄存器GPIOx_ODR开始,单片机可以对该寄存器修改值,从而给输出控制一个信号。
除此之外对置位/复位寄存器 GPIOx_BSRR的值进行修改也可以影响”输出数据寄存器“的值。
下面是本次例程的配置GPIO编程要点:
-
使能GPIO端口时钟
要使用这个外设,首先得使能时钟,没什么说的。
bsp_led.c
1
2
3/*开启LED相关的GPIO外设时钟*/
LED1_GPIO_CLK_ENABLE();
LED2_GPIO_CLK_ENABLE();这里使能时钟用的函数是宏定义的名字,实际是用
__HAL_RCC_GPIOx_CLK_ENABLE()这个函数。注意
GPIOx改成实际的port口。
这里的GPIO时钟宏__HAL_RCC_GPIOx_CLK_ENABLE()是 STM32HAL库定义的GPIO端口时钟相关的宏,它的作用与GPIO_PIN_x这类宏类似,是用于指示寄存器位的,方便库函数使用。 -
初始化GPIO目标引脚为推挽输出模式,配置GPIO初始化结构体
没有什么特殊需求,所以输出模式直接使用推挽输出模式
bsp_led.c
1
2
3
4
5
6
7
8
9
10
11/*选择要控制的GPIO引脚*/
GPIO_InitStruct.Pin = LED1_PIN;
/*设置引脚的输出类型为推挽输出*/
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
/*设置引脚为上拉模式*/
GPIO_InitStruct.Pull = GPIO_PULLUP;
/*设置引脚速率为高速 */
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;这里配置了四个东西,分别是:
GPIO_InitStruct.Pin:pin号
GPIO_InitStruct.Mode:输出模式
GPIO_InitStruct.Pull:上下拉模式
GPIO_InitStruct.Speed:引脚速率其中HAL库中配置输出模式:
推挽输出GPIO_MODE_OUTPUT_PP;
开漏输出GPIO_MODE_OUTPUT_OD;
复用推挽输出GPIO_MODE_AF_PP;
复用开漏输出GPIO_MODE_AF_OD;
……等等其中的简写全称记录如下:
PP for push-pull,推挽
OD for open-drain,开漏
AF for alternate function,复用功能关于HAL库中GPIO初始化结构体成员变量的配置,考虑到本次例程的篇幅,现简单记录如上,后面有时间做一个总结。
下面是整个初始化函数的程序:
bsp_led.c
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30void LED_GPIO_Config(void)
{
/*定义一个GPIO_InitTypeDef类型的结构体*/
GPIO_InitTypeDef GPIO_InitStruct;
/*开启LED相关的GPIO外设时钟*/
LED1_GPIO_CLK_ENABLE();
LED2_GPIO_CLK_ENABLE();
/*设置引脚的输出类型为推挽输出*/
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
/*设置引脚为上拉模式*/
GPIO_InitStruct.Pull = GPIO_PULLUP;
/*设置引脚速率为高速 */
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
/*调用库函数,使用上面配置的GPIO_InitStructure初始化GPIO*/
/*选择要控制的GPIO引脚*/
GPIO_InitStruct.Pin = LED1_PIN;
HAL_GPIO_Init(LED1_GPIO_PORT, &GPIO_InitStruct);
/*选择要控制的GPIO引脚*/
GPIO_InitStruct.Pin = LED2_PIN;
HAL_GPIO_Init(LED2_GPIO_PORT, &GPIO_InitStruct);
/*关闭RGB灯*/
LED_RGBOFF;
} -
编写简单测试程序,控制GPIO引脚输出高低电平
main函数
main.c
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20int main(void)
{
/* 系统时钟初始化成72 MHz */
SystemClock_Config();
/* LED 端口初始化 */
LED_GPIO_Config();
/* 控制LED灯 */
while (1)
{
LED1( ON ); // 亮
HAL_Delay(1000);
LED1( OFF ); // 灭
LED2( ON ); // 亮
HAL_Delay(1000);
LED2( OFF ); // 灭
}
}控制LED使用的宏定义
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19/* 直接操作寄存器的方法控制IO */
#define digitalHi(p,i) {p->BSRR=i;} //设置为高电平
#define digitalLo(p,i) {p->BSRR=(uint32_t)i << 16;} //输出低电平
#define digitalToggle(p,i) {p->ODR ^=i;} //输出反转状态
/* 定义控制IO的宏 */
#define LED1_TOGGLE digitalToggle(LED1_GPIO_PORT,LED1_PIN)
#define LED1_OFF digitalHi(LED1_GPIO_PORT,LED1_PIN)
#define LED1_ON digitalLo(LED1_GPIO_PORT,LED1_PIN)
#define LED2_TOGGLE digitalToggle(LED2_GPIO_PORT,LED2_PIN)
#define LED2_OFF digitalHi(LED2_GPIO_PORT,LED2_PIN)
#define LED2_ON digitalLo(LED2_GPIO_PORT,LED2_PIN)
//黑(全部关闭)
#define LED_RGBOFF \
LED1_OFF;\
LED2_OFF大概就是这样。
1.5 总结
关于GPIO的分析和HAL库的配置大概就是这样。与三极管,实现控制大功率电路通断。
输入功能可以实现检测外部电平、读取引脚状态、采集模拟信号等功能。
下面对GPIO基本框图进行分析,了解GPIO主要的工作原理。
过一遍理解就可,有个印象
1.6 GPIO基本框图
虽然标注的有点花花绿绿()但是大致上可以分为三个部分:
- 紫色为引脚与外部设备连接的端口。
- 以蓝色箭头为主线的一串冷色相关的,为输入模式相关的电路。
- 以红色箭头为主线的一串暖色相关的,为输出模式相关的电路。
首先是紫色的保护二极管与上下拉电阻。
引脚电压高于 ,上方二极管导通。
引脚电压低于 ,下方二极管导通。
这样就可以防止不正常的电压引入芯片导致芯片烧毁。但要注意,纵使有这样的保护也不能直接外接大功率驱动器件。
其次是红色的输出模式这一条线,从左往右看。
由输出数据寄存器GPIOx_ODR开始,单片机可以对该寄存器修改值,从而给输出控制一个信号。
除此之外对置位/复位寄存器 GPIOx_BSRR的值进行修改也可以影响”输出数据寄存器“的值。
由这两个寄存器给出信号之后,通过一个开关接入输出控制。该开关可以控制是由”输出数据寄存器“还是由其他片上外设作为”输出源“。
例如要使用串口的时候,需要一个通讯发送引脚的时候,就可以将某个GPIO引脚配置为串口复用功能。
最关键的是由P-MOS与N-MOS两个管子组成的单元电路。这个单元电路使得GPIO的输出模式有两个模式,分别是推挽输出和开漏输出。
推挽输出中
输出源给高电平,经过反向,上方的P-MOS导通,下方的N-MOS关闭,对外输出高电平;
输出源给低电平,经过反向,上方N-MOS管关闭,上方P-MOS导通,对外输出低电平;
开漏输出中,上方的P_MOS不工作
当N-MOS导通的时候对外输出为低电平(接地);
当N-MOS关闭的时候对外为高阻态,正常使用的时候需要接上拉电阻;此时等效于开漏电路,具有“线与”特性,一般应用在I2C、SMBUS通讯等需要“线与”功能的总线电路中,或者需要输出电平不匹配的时候。
比如需要输出 5 伏的高电平,就可以在外部接一个上拉电阻,上拉电源为 5 伏, 并且把GPIO设置为开漏模式,当输出高阻态时,由上拉电阻和电源向外输出 5 伏的电平。
最后是蓝色的输入模式这一条线,从右往左看。
通过引脚采集电压之后,首先通过上/下拉电阻,配置成上/下拉输入,随后接一个TTL肖特基触发器,进行模数转换。
最后将触发器给出的数字信号存储在“输入数据寄存器GPIOx_IDR”中,通过读取该寄存器就可以了解GPIO引脚的电平状态。
输入模式中的复用功能输入与复用功能输出类似,也只是不经过“输入数据寄存器”,直接连接其他的片上外设,让别的外设读取引脚状态。
例如使用串口通讯,需要一个通讯接收引脚的时候,就可以将某个GPIO引脚配置为串口复用功能。此处与输出模式的复用功能输入所举的例子对应。
模拟输入与输出的通道是当引脚需要做ADC/DAC的时候,需要用原始信号时所提供的通道。
ADC时需要采集原始的模拟信号,因此不经过触发器。
DAC时需要输出原始的模拟信号,因此不经过双MOS管的结构。
A for analog, D for digital. ADC-模数转换,DAC数模转换。
至此基本将GPIO的原理框图进行了一遍梳理,下面为在HAL库中如何配置GPIO的一些记录。
1.7 HAL库中GPIO的配置
本节例程参考野火的<STM32 HAL库开发实战指南——F103系列>使用固件库点亮LED一章
首先明确一下软件上的层级关系:
LED灯的控制相关的代码不属于STM32HAL库的内容,一般将这样的控制代码封装在另外的文件中。本次例程中将文件名命名为bsp_led.c与bsp_led.h,这里的bsp是Board Support Packet的简写,即板级支持包。
对bsp的个人理解:不同外设的控制代码。
本次使用的开发板是野火的F103-MINI 开发板,下面是本次例程所涉及的硬件原理图:
如图所示容易看出,若将这两个GPIO引脚设置为低电平即可点亮LED。
本次例程中关于引脚定义的宏:
bsp_led.h
1 | |
1 | |
此处控制LED亮灭的操作是直接向BSRR写入控制指令来实现的,对BSRR低 16 位 写 1 输出高电平,对BSRR高 16 位写 1 输出低电平。同时,对ODR某位进行异或操作可反转位的状态。
BSRR和ODR在前文详解GPIO框图的输出模式时候提到过
BSRR:置位/复位寄存器 GPIOx_BSRR,Bit Set/Reset Register
ODR:输出数据寄存器GPIOx_ODR,Output Data Register
由
输出数据寄存器GPIOx_ODR开始,单片机可以对该寄存器修改值,从而给输出控制一个信号。
除此之外对置位/复位寄存器 GPIOx_BSRR的值进行修改也可以影响”输出数据寄存器“的值。
下面是本次例程的配置GPIO编程要点:
-
使能GPIO端口时钟
要使用这个外设,首先得使能时钟,没什么说的。
bsp_led.c
1
2
3/*开启LED相关的GPIO外设时钟*/
LED1_GPIO_CLK_ENABLE();
LED2_GPIO_CLK_ENABLE();这里使能时钟用的函数是宏定义的名字,实际是用
__HAL_RCC_GPIOx_CLK_ENABLE()这个函数。注意
GPIOx改成实际的port口。
这里的GPIO时钟宏__HAL_RCC_GPIOx_CLK_ENABLE()是 STM32HAL库定义的GPIO端口时钟相关的宏,它的作用与GPIO_PIN_x这类宏类似,是用于指示寄存器位的,方便库函数使用。 -
初始化GPIO目标引脚为推挽输出模式,配置GPIO初始化结构体
没有什么特殊需求,所以输出模式直接使用推挽输出模式
bsp_led.c
1
2
3
4
5
6
7
8
9
10
11/*选择要控制的GPIO引脚*/
GPIO_InitStruct.Pin = LED1_PIN;
/*设置引脚的输出类型为推挽输出*/
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
/*设置引脚为上拉模式*/
GPIO_InitStruct.Pull = GPIO_PULLUP;
/*设置引脚速率为高速 */
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;这里配置了四个东西,分别是:
GPIO_InitStruct.Pin:pin号
GPIO_InitStruct.Mode:输出模式
GPIO_InitStruct.Pull:上下拉模式
GPIO_InitStruct.Speed:引脚速率其中HAL库中配置输出模式:
推挽输出GPIO_MODE_OUTPUT_PP;
开漏输出GPIO_MODE_OUTPUT_OD;
复用推挽输出GPIO_MODE_AF_PP;
复用开漏输出GPIO_MODE_AF_OD;
……等等其中的简写全称记录如下:
PP for push-pull,推挽
OD for open-drain,开漏
AF for alternate function,复用功能关于HAL库中GPIO初始化结构体成员变量的配置,考虑到本次例程的篇幅,现简单记录如上,后面有时间做一个总结。
下面是整个初始化函数的程序:
bsp_led.c
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30void LED_GPIO_Config(void)
{
/*定义一个GPIO_InitTypeDef类型的结构体*/
GPIO_InitTypeDef GPIO_InitStruct;
/*开启LED相关的GPIO外设时钟*/
LED1_GPIO_CLK_ENABLE();
LED2_GPIO_CLK_ENABLE();
/*设置引脚的输出类型为推挽输出*/
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
/*设置引脚为上拉模式*/
GPIO_InitStruct.Pull = GPIO_PULLUP;
/*设置引脚速率为高速 */
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
/*调用库函数,使用上面配置的GPIO_InitStructure初始化GPIO*/
/*选择要控制的GPIO引脚*/
GPIO_InitStruct.Pin = LED1_PIN;
HAL_GPIO_Init(LED1_GPIO_PORT, &GPIO_InitStruct);
/*选择要控制的GPIO引脚*/
GPIO_InitStruct.Pin = LED2_PIN;
HAL_GPIO_Init(LED2_GPIO_PORT, &GPIO_InitStruct);
/*关闭RGB灯*/
LED_RGBOFF;
} -
编写简单测试程序,控制GPIO引脚输出高低电平
main函数
main.c
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20int main(void)
{
/* 系统时钟初始化成72 MHz */
SystemClock_Config();
/* LED 端口初始化 */
LED_GPIO_Config();
/* 控制LED灯 */
while (1)
{
LED1( ON ); // 亮
HAL_Delay(1000);
LED1( OFF ); // 灭
LED2( ON ); // 亮
HAL_Delay(1000);
LED2( OFF ); // 灭
}
}控制LED使用的宏定义
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19/* 直接操作寄存器的方法控制IO */
#define digitalHi(p,i) {p->BSRR=i;} //设置为高电平
#define digitalLo(p,i) {p->BSRR=(uint32_t)i << 16;} //输出低电平
#define digitalToggle(p,i) {p->ODR ^=i;} //输出反转状态
/* 定义控制IO的宏 */
#define LED1_TOGGLE digitalToggle(LED1_GPIO_PORT,LED1_PIN)
#define LED1_OFF digitalHi(LED1_GPIO_PORT,LED1_PIN)
#define LED1_ON digitalLo(LED1_GPIO_PORT,LED1_PIN)
#define LED2_TOGGLE digitalToggle(LED2_GPIO_PORT,LED2_PIN)
#define LED2_OFF digitalHi(LED2_GPIO_PORT,LED2_PIN)
#define LED2_ON digitalLo(LED2_GPIO_PORT,LED2_PIN)
//黑(全部关闭)
#define LED_RGBOFF \
LED1_OFF;\
LED2_OFF大概就是这样。
1.8 总结
关于GPIO的分析和HAL库的配置大概就是这样。